AI & ML Models
0.0 (0 reviews) • 0 downloads
Visual odometry Compare 2 Place Image in Python Projects
र 1000
Visual odometry Compare 2 Place Image in Python Projects
Technical Details
Domain : Python
Database : Sqlite
Tools : Anaconda
Run Tools: VS Code
Database : Sqlite
Tools : Anaconda
Run Tools: VS Code
Secure Payment
Instant Download
GST Invoice
24/7 Support
About This Product
Visual odometry Compare 2 Place Image in Python Projects
Abstract
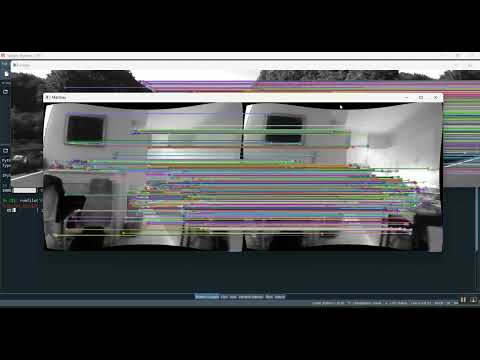
Visual odometry is a key technique in computer vision and robotics for estimating camera motion and understanding scene structure from visual input. This project focuses on Visual Odometry using Python to Compare Two Place Images, which analyzes images from different locations to detect movement, orientation changes, and relative positioning. The system extracts key features, matches them across images, and computes the camera trajectory or scene differences. Python libraries such as OpenCV, NumPy, and Matplotlib are used for feature detection, matching, and visualization. The project aims to provide accurate motion estimation and comparison between images of two locations, which is useful in autonomous navigation, robotics, and augmented reality applications.
Existing System
Existing systems for visual odometry often rely on GPS-based localization, IMU sensors, or manual mapping techniques. GPS-based methods can be inaccurate in indoor or urban canyon environments, while IMU-based methods accumulate drift over time. Traditional computer vision approaches use feature detection and tracking, such as SIFT, SURF, or ORB, but may fail in texture-less areas, lighting changes, or significant viewpoint differences. Many existing systems also do not provide a straightforward comparison between two images to quantify motion or scene difference. Consequently, current solutions may suffer from reduced accuracy, limited robustness, and lack of practical visualization for motion comparison.
Proposed System
The proposed system implements a Python-based visual odometry framework for comparing two images from different places. The system first preprocesses images to enhance contrast and normalize illumination. Feature detection techniques such as ORB, SIFT, or SURF are applied to extract keypoints, which are then matched between the two images. Using the matched points, the system computes the essential or homography matrix to estimate relative motion, camera displacement, and orientation changes. Visualization tools display the matched keypoints and estimated trajectories for clear comparison. By combining feature-based matching with motion estimation algorithms, the system provides an accurate, robust, and interactive solution for analyzing camera movement, comparing scene differences, and supporting applications in robotics, autonomous vehicles, and augmented reality.
Abstract
Visual odometry is a key technique in computer vision and robotics for estimating camera motion and understanding scene structure from visual input. This project focuses on Visual Odometry using Python to Compare Two Place Images, which analyzes images from different locations to detect movement, orientation changes, and relative positioning. The system extracts key features, matches them across images, and computes the camera trajectory or scene differences. Python libraries such as OpenCV, NumPy, and Matplotlib are used for feature detection, matching, and visualization. The project aims to provide accurate motion estimation and comparison between images of two locations, which is useful in autonomous navigation, robotics, and augmented reality applications.
Existing System
Existing systems for visual odometry often rely on GPS-based localization, IMU sensors, or manual mapping techniques. GPS-based methods can be inaccurate in indoor or urban canyon environments, while IMU-based methods accumulate drift over time. Traditional computer vision approaches use feature detection and tracking, such as SIFT, SURF, or ORB, but may fail in texture-less areas, lighting changes, or significant viewpoint differences. Many existing systems also do not provide a straightforward comparison between two images to quantify motion or scene difference. Consequently, current solutions may suffer from reduced accuracy, limited robustness, and lack of practical visualization for motion comparison.
Proposed System
The proposed system implements a Python-based visual odometry framework for comparing two images from different places. The system first preprocesses images to enhance contrast and normalize illumination. Feature detection techniques such as ORB, SIFT, or SURF are applied to extract keypoints, which are then matched between the two images. Using the matched points, the system computes the essential or homography matrix to estimate relative motion, camera displacement, and orientation changes. Visualization tools display the matched keypoints and estimated trajectories for clear comparison. By combining feature-based matching with motion estimation algorithms, the system provides an accurate, robust, and interactive solution for analyzing camera movement, comparing scene differences, and supporting applications in robotics, autonomous vehicles, and augmented reality.
Customer Reviews (0)
No reviews yet. Be the first!
Related Products
⭐ Featured

AI & ML Models
Zomato Restaurant Reviews Sentimental Analyzer in Python Projects
Zomato Restaurant Reviews Sentimental Analyzer in Python Projects
र 1000
⭐ Featured
⭐ Featured
AI & ML Models
Voice Disorder Prediction using Audio Dataset in Python Projects
Voice Disorder Prediction using Audio Dataset in Python Projects
र 1000
AI & ML Models
Vitamin Deficiency Detection Using Image Processing in Python Projects
Vitamin Deficiency Detection Using Image Processing in Python Projects
र 1000